Example solution:
Example of a computed construction: Regular hexagon by the side. Following figures describes step by step construction.
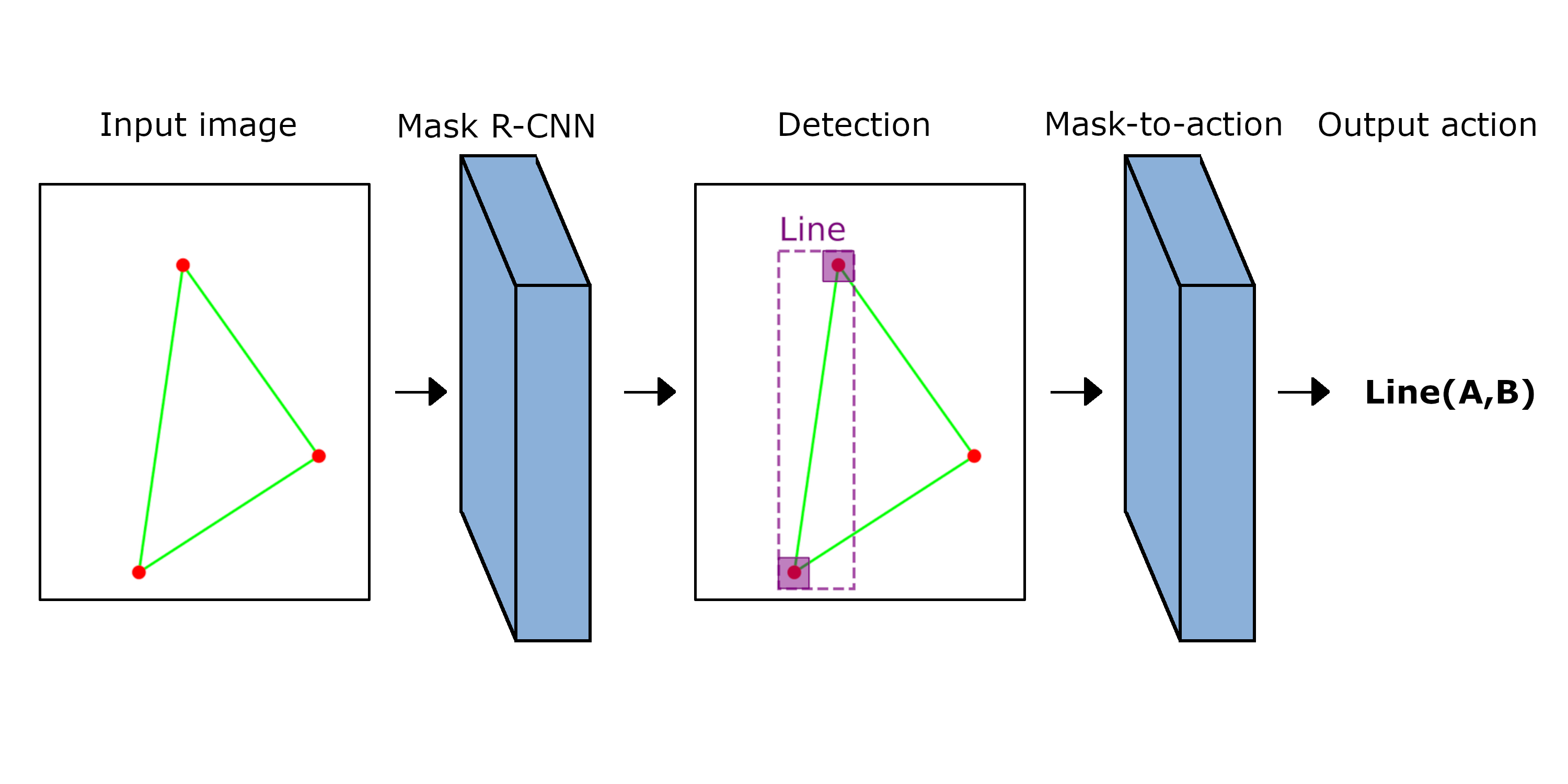
Each step is on one row, and contains current progress on the left and the Mask R-CNN prediction for a new step on the right.
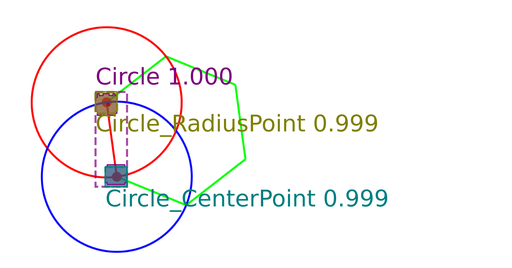
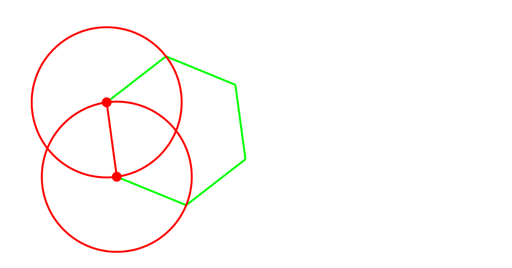
The red denotes the current state of the construction, the green color denotes the remaining goal
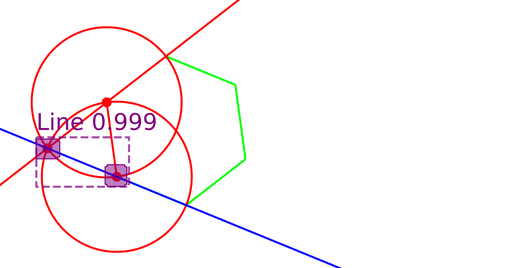
and the blue color denotes new circle/line that will be constructed based on the detection.
Other colors mark prediction masks, bounding boxes, classes and scores for each detected object.
|
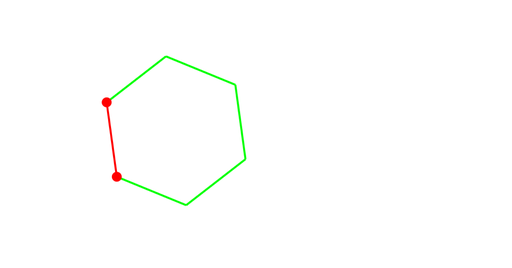 a) Level definition and first input for the
network. Construct a regular hexagon
given by the side. The green color denotes the goal and the red denotes the
current state of the construction.
a) Level definition and first input for the
network. Construct a regular hexagon
given by the side. The green color denotes the goal and the red denotes the
current state of the construction.
|
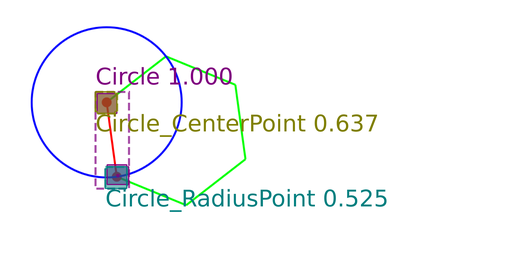 b) Prediction of the network. Based on
this prediction, a circle will be constructed.
b) Prediction of the network. Based on
this prediction, a circle will be constructed.
|
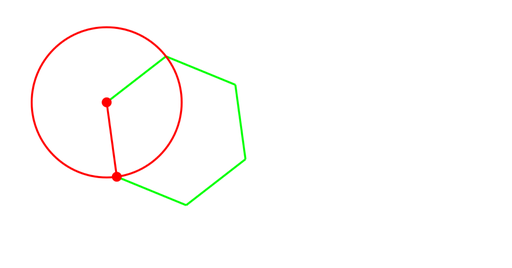 c) Step 1.
c) Step 1.
|
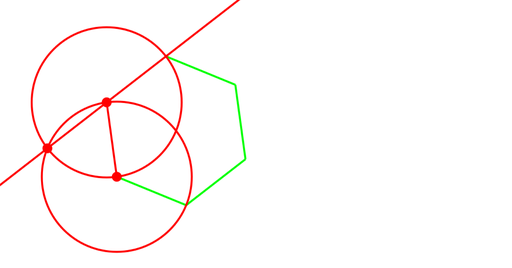
 d) Prediction for step 2. Based on this
prediction, a line will be constructed.
d) Prediction for step 2. Based on this
prediction, a line will be constructed.
|
 e) Step 2.
e) Step 2.
|
 f) Prediction for step 3. Based on this
prediction, a line will be constructed.
f) Prediction for step 3. Based on this
prediction, a line will be constructed.
|
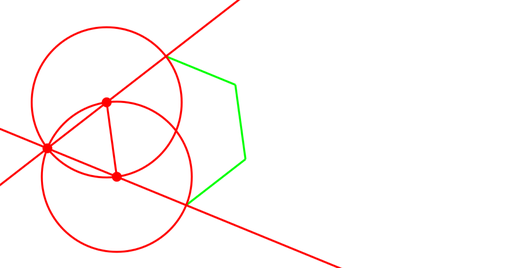
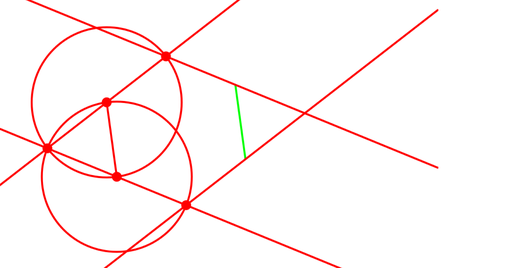
 g) Step 3.
g) Step 3.
|
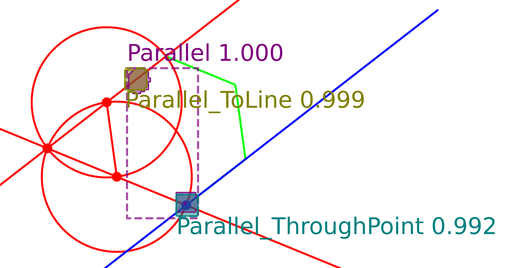
 h) Prediction for step 4. Based on this
prediction, an angle bisector will be constructed. Note that there is an extra detection of parallel through point. Later
in construction score of this prediction
will increase and the prediction will be
used.
h) Prediction for step 4. Based on this
prediction, an angle bisector will be constructed. Note that there is an extra detection of parallel through point. Later
in construction score of this prediction
will increase and the prediction will be
used.
|
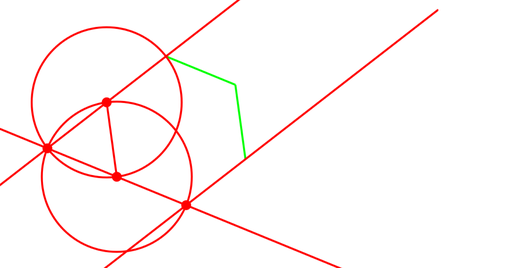
 i) Step 4. The parallel line constructed
part of the goal.
i) Step 4. The parallel line constructed
part of the goal.
|
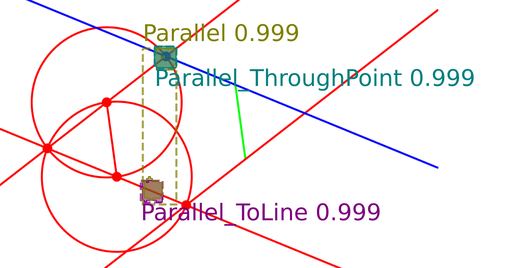
 j) Prediction for step 5. Based on this
prediction, a parallel line will be constructed.
j) Prediction for step 5. Based on this
prediction, a parallel line will be constructed.
|
 k) Step 5. The parallel line constructed
another part of the goal.
k) Step 5. The parallel line constructed
another part of the goal.
|
 l) Prediction for step 5. Based on this
prediction, a parallel line will be constructed.
l) Prediction for step 5. Based on this
prediction, a parallel line will be constructed.
|
 m) Step 6. The perpendicular bisector
constructed another part of the goal
m) Step 6. The perpendicular bisector
constructed another part of the goal
|
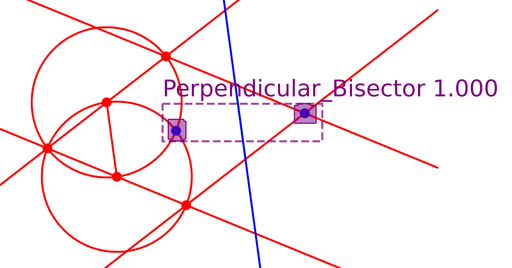 n) Prediction for step 5. Based on this
prediction, a perpendicular bisector will
be constructed.
n) Prediction for step 5. Based on this
prediction, a perpendicular bisector will
be constructed.
|
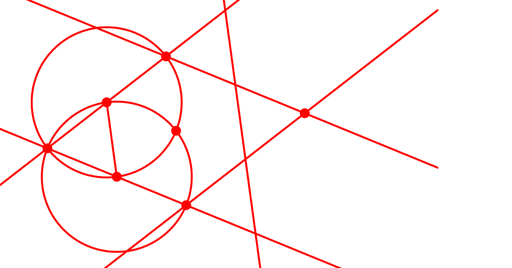 o) Step 7 - level successfully finished, the
whole goal has been constructed.
o) Step 7 - level successfully finished, the
whole goal has been constructed.
|
|